

Secara amnya dipercayai bahawa jika konfigurasi peranti pemacu penghantar tali pinggang terlalu tinggi, ia adalah satu pembaziran sumber. Walau bagaimanapun, untuk peralatan yang besar, jika ia terlalu rendah, ia akan menyebabkan ketegangan dinamik meningkat apabila tali pinggang dimulakan, malah menyebabkan tali pinggang bergema. Cara memilih peranti pemanduan secara munasabah adalah kunci dalam reka bentuk penghantar tali pinggang. Ia juga merupakan isu utama sama ada reka bentuk itu munasabah, operasinya normal, dan kos penyelenggaraan dan volum penyelenggaraan adalah rendah. Artikel ini menganalisis aplikasi, kelebihan dan kekurangan beberapa kaedah pemanduan biasa untuk rujukan.

1. Penggelek elektrik
Drum elektrik dibahagikan kepada dram elektrik terbina dalam dan dram elektrik luaran. Perbezaan utama di antara mereka ialah motor dram elektrik terbina dalam dipasang di dalam dram, manakala motor dram elektrik luaran dipasang di luar dram dan disambungkan dengan tegar ke dram.
Drum elektrik terbina dalam mempunyai pelesapan haba yang lemah kerana motor dipasang di dalam dram. Ia biasanya digunakan pada penghantar tali pinggang dengan kuasa kurang daripada 30kw dan panjang kurang daripada 150m. Kerana motor dipasang di luar dram, dram elektrik luaran mempunyai pelesapan haba yang lebih baik. Ia biasanya digunakan pada penghantar tali pinggang dengan kuasa kurang daripada 45kw dan panjang kurang daripada 150m.
Kelebihan: struktur padat, kos penyelenggaraan yang rendah, kebolehpercayaan yang tinggi, peranti pemanduan dan roller penghantaran disepadukan menjadi satu.
Kelemahan: Prestasi permulaan lembut yang lemah, kesan besar pada grid kuasa apabila motor dihidupkan. Kebolehpercayaan adalah lebih teruk daripada kaedah pemacu motor jenis Y + gandingan + pemacu.
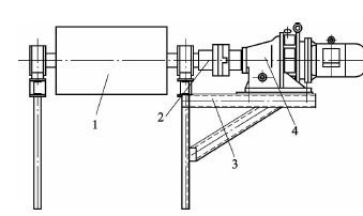
2. Mod pemanduan motor jenis Y + gandingan + pengurang yang lemah
Kelebihan: struktur mudah, beban kerja penyelenggaraan yang kecil, kos penyelenggaraan yang rendah dan kebolehpercayaan yang tinggi.
Kelemahan: Prestasi permulaan lembut yang lemah, kesan besar pada grid kuasa apabila motor dihidupkan. Biasanya digunakan pada penghantar tali pinggang dengan kuasa kurang daripada 45kw dan panjang kurang daripada 150m.
3. Motor jenis Y + gandingan bendalir pengehad tork + pengurang
Ia adalah peranti pemanduan yang digunakan secara meluas pada penghantar tali pinggang, yang biasanya digunakan dalam penghantar tali pinggang dengan kuasa tunggal kurang daripada 630kw dan panjang kurang daripada 1500m.
Gandingan bendalir had segi empat tepat dibahagikan kepada gandingan bendalir had segi empat tepat dengan ruang bantu belakang dan gandingan bendalir had segi empat tepat tanpa ruang bantu belakang. Kerana bekas perlahan-lahan memasuki rongga kerja gandingan bendalir melalui lubang pendikit melalui ruang bantu belakang apabila motor dihidupkan, prestasi permulaannya lebih baik daripada yang kedua.
Jika yang mempunyai ruang tambahan belakang dipilih, apabila kedua-dua model gandingan bendalir dapat memenuhi kuasa penghantarannya, disebabkan oleh masa permulaan yang panjang dan penjanaan haba yang besar bagi gandingan bendalir, jenis gandingan bendalir yang lebih besar harus diutamakan.
Jika yang tanpa ruang tambahan belakang dipilih, apabila kedua-dua model gandingan bendalir dapat memenuhi kuasa penghantarannya, jenis gandingan bendalir yang lebih kecil harus diutamakan kerana masa permulaan gandingan bendalir adalah pendek dan penjanaan haba adalah kecil.
Untuk penghantar tali pinggang yang digerakkan oleh berbilang motor, jika kaedah pemacu ini dipilih, adalah disyorkan untuk memilih gandingan bendalir dengan gandingan bendalir jenis pengehad tork bantu belakang.
Kelebihan: kos efektif, struktur ringkas dan padat, beban kerja penyelenggaraan yang kecil, kos penyelenggaraan yang rendah, beban motor perlindungan, apabila berbilang motor digerakkan, kuasa motor boleh diseimbangkan, permulaan kelewatan boleh dibahagikan kepada stesen, dan impak pada grid kuasa apabila penghantar tali pinggang dikurangkan, kebolehpercayaan adalah tinggi, harga rendah, dan ia adalah mod pemanduan pilihan kurang daripada 100m.
Kelemahan: Prestasi permulaan lembut adalah lemah, dan ia tidak sesuai untuk penghantar tali pinggang digunakan untuk penghantar tali pinggang pengangkutan ke bawah, dan penghantar tali pinggang yang memerlukan fungsi peraturan kelajuan.
4. Motor jenis Y + gandingan bendalir pengatur kelajuan + pengurang
Kaedah pemanduan yang biasa digunakan untuk penghantar tali pinggang besar, yang biasanya digunakan pada penghantar tali pinggang besar jarak jauh dengan panjang lebih daripada 800m.
Kelebihan: strukturnya mudah, beban kerja penyelenggaraan yang berlebihan adalah kecil, motor dimulakan tanpa beban, motor terlebih beban, apabila berbilang motor digerakkan, ia boleh ditangguhkan untuk dimulakan, mengurangkan kesan penghantar tali pinggang pada grid kuasa apabila ia dimulakan, kebolehpercayaan lebih tinggi, prestasi permulaan lembut lebih baik, dan ia mempunyai prestasi permulaan yang boleh dikawal, iaitu masa permulaan yang boleh dikawal, iaitu masa permulaan yang boleh dikawal, iaitu masa permulaan yang boleh dikawal. boleh dikawal, dan harganya rendah.
Kelemahan: Apabila gandingan bendalir dimulakan, kerana perubahan isipadu minyak dan keluk perubahan kelajuan rongga kerja gandingan bendalir adalah tidak linear dan mempunyai kemunduran, tindak balas dinamik yang boleh dikawal adalah perlahan, dan sukar untuk melakukan kawalan gelung tertutup, dan kadangkala terdapat kebocoran minyak. Ia tidak sesuai untuk penghantar tali pinggang penghantar ke bawah, dan penghantar tali pinggang dengan fungsi peraturan kelajuan diperlukan.

5. Motor jenis Y + peranti pemacu CST
Motor jenis Y + peranti pemacu CST direka untuk penghantar tali pinggang oleh Syarikat Dodge dari Amerika Syarikat, dengan kebolehpercayaan tinggi peranti pemacu mekatronik, biasanya digunakan dalam penghantar tali pinggang besar jarak jauh dengan panjang lebih daripada 1000m.
Kelebihan: prestasi permulaan lembut yang baik, lengkung kelajuan linear dan boleh dikawal apabila bermula, lengkung kelajuan boleh dikawal semasa meletak kereta, kawalan gelung tertutup boleh dilakukan, permulaan tanpa beban motor, struktur mudah, beban kerja penyelenggaraan kecil, apabila berbilang motor dipandu, ia boleh ditangguhkan untuk dimulakan secara berperingkat, dan mengurangkan kesan penghantar tali pinggang pada grid kuasa apabila dimulakan.
Kelemahan: keperluan tinggi untuk pekerja penyelenggaraan dan minyak pelincir, harga peralatan yang tinggi. Ia tidak sesuai untuk penghantar tali pinggang penghantar ke bawah, dan penghantar tali pinggang dengan fungsi peraturan kelajuan diperlukan.
6. Motor penggulungan + pengurang
Terdapat tiga mod kawalan motor penggulungan + pengurang:
Jenis pertama: perintang frekuensi tali motor luka atau rintangan air;
Tiada fungsi peraturan kelajuan, dan motor tidak boleh dimulakan dengan kerap, biasanya digunakan dalam penghantar tali pinggang dengan panjang lebih daripada 500m dan motor tidak dimulakan dengan kerap.
Jenis kedua: wayar-luka motor rentetan perintang logam;
Tiada fungsi peraturan kelajuan, tetapi motor boleh dimulakan dengan kerap, dan selepas membrek dengan kuasa thyristor, ia adalah kaedah pemanduan biasa untuk penghantar tali pinggang ke bawah.
Jenis ketiga: peraturan kelajuan lata motor penggulungan.
Ia mempunyai fungsi pengawalan kelajuan, boleh digunakan untuk kawalan gelung tertutup, dan biasanya digunakan dalam penghantar tali pinggang besar dengan jarak jauh lebih daripada 1000m dan fungsi peraturan kelajuan.
Kelebihan: kaedah kawalan pertama dan kedua, struktur mudah, beban kerja penyelenggaraan kecil, prestasi permulaan lembut yang baik, harga rendah, kesan kecil pada grid kuasa apabila bermula, kebolehpercayaan yang tinggi, prestasi terkawal yang baik; Mod kawalan ketiga mempunyai prestasi brek kuasa yang sangat baik.
Kelemahan: mod kawalan pertama dan kedua mempunyai penggunaan tenaga yang besar apabila memulakan dan berhenti; Sistem mod kawalan ketiga adalah kompleks, dan terdapat kecenderungan untuk digantikan dengan frekuensi berselang-seli atau frekuensi berselang-seli.
7. Motor DC berkelajuan tinggi + pengurang
Mod pemacu dengan fungsi pengawalan kelajuan, yang biasanya digunakan dalam penghantar tali pinggang besar yang memerlukan fungsi peraturan kelajuan.
Kelebihan: prestasi permulaan lembut yang baik, lengkung kelajuan terkawal linear semasa permulaan, lengkung kelajuan terkawal linear semasa meletak kereta, prestasi brek elektrik yang baik, perubahan kelajuan tanpa langkah, prestasi terkawal yang sangat baik, boleh melakukan kawalan gelung tertutup, kebolehpercayaan yang tinggi.
Kelemahan: harganya sangat mahal, sistem penerus thyristor adalah kompleks, peralatan kawalan elektronik meliputi kawasan yang luas, faktor kuasa rendah, motor DC mempunyai gelang gelincir, haus berus besar, beban kerja penyelenggaraan adalah besar, tiada jenis kalis letupan pada masa ini, dan ia tidak boleh digunakan dalam lombong arang batu.

8. Motor DC berkelajuan rendah terus memacu roller pemacu penghantar tali pinggang
Mod pemanduan dengan fungsi pengawalan kelajuan biasanya digunakan pada penghantar tali pinggang besar yang memerlukan fungsi pengawalan kelajuan dan penghantar tali pinggang dengan kuasa motor tunggal lebih besar daripada 1000kw.
Kelebihan: prestasi permulaan lembut yang sangat baik, lengkung kelajuan terkawal linear apabila bermula, lengkung kelajuan terkawal linear semasa meletak kereta, prestasi brek elektrik yang baik, perubahan kelajuan tanpa langkah, prestasi terkawal yang sangat baik, kawalan gelung tertutup, tiada pengurang, kebolehpercayaan yang tinggi.
Kelemahan: harganya sangat mahal, sistem penerus thyristor adalah kompleks, peralatan kawalan elektronik meliputi kawasan yang luas, faktor kuasa rendah, motor DC mempunyai gelang gelincir, haus berus besar, beban kerja penyelenggaraan adalah besar, dan jenis kalis letupan kuasa tinggi semasa tidak boleh digunakan di lombong arang batu.
9. Kelajuan penukaran frekuensi mengawal selia motor + pengurang
Terdapat dua kaedah kawalan untuk motor kelajuan penukaran frekuensi + pengurang:
Jenis pertama: penukaran frekuensi bersilang dan berselang-seli
Faktor kuasa sistem penukaran frekuensi berselang-seli adalah rendah, dan sejumlah besar harmonik pesanan tinggi akan dijana semasa permulaan dan operasi, yang akan menyebabkan pencemaran pada grid kuasa. Permulaan motor yang kerap juga akan menyebabkan kesan kuasa reaktif yang besar pada grid kuasa, yang mesti diuruskan secara menyeluruh. Pelaburan dalam peralatan penukaran frekuensi agak rendah.
Jenis kedua: pertukaran telah menjadi penukaran frekuensi berselang-seli
Disebabkan oleh fakta bahawa sistem penukaran frekuensi berselang-seli dilengkapi dengan unit penapis dan unit pampasan dalam peranti, faktor kuasa adalah lebih besar daripada 0.9, komponen harmonik yang lebih tinggi adalah sangat kecil, dan ia tidak akan menyebabkan pencemaran harmonik, dan tidak ada keperluan untuk menyediakan penyerapan harmonik dan peranti pampasan kuasa reaktif, tetapi kuasa tunggal adalah lebih besar daripada 2000k yang dihasilkan pada sistem frekuensi dan peralatan yang dihasilkan di China. dan alat ganti mesti diimport, yang agak tinggi dalam pelaburan pertama. Ia biasanya digunakan dalam penghantar tali pinggang besar yang memerlukan fungsi peraturan kelajuan.
Kelebihan: prestasi permulaan lembut yang sangat baik, lengkung kelajuan terkawal linear apabila bermula, lengkung kelajuan terkawal linear apabila meletak kereta, prestasi brek elektrik yang baik, perubahan kelajuan tanpa langkah, prestasi terkawal yang sangat baik, kawalan gelung tertutup, kebolehpercayaan yang tinggi.
Kelemahan: harganya sangat mahal, peralatan kawalan elektronik meliputi kawasan yang luas, kuasa tunggal semasa lebih besar daripada jenis bukan kalis letupan 400kw, tidak boleh digunakan dalam lombong arang batu.
Melalui analisis di atas tentang kelebihan dan kekurangan pelbagai mod pemanduan penghantar tali pinggang, apabila memilih peranti pemacu penghantar tali pinggang:
Bagi penghantar tali pinggang yang tidak memerlukan peraturan kelajuan dan panjang penghantar tali pinggang adalah kurang daripada 1500m, motor jenis Y + tork mengehadkan gandingan bendalir + pengurang adalah mod pemanduan pilihannya, diikuti dengan penggulungan motor + pengurang (mod kawalan ialah rintangan logam rentetan motor penggulungan);
Jika panjang penghantar tali pinggang lebih panjang daripada 1500m, motor jenis Y + peranti pemacu CST adalah kaedah pemanduan pilihan, diikuti oleh motor jenis Y + gandingan cecair pengawal selia kelajuan + pengurang.
Sekiranya volum trafik penghantar tali pinggang berubah dengan banyak dan peraturan kelajuan diperlukan, motor peraturan kelajuan penukaran frekuensi + pengurang adalah kaedah pemanduan pilihannya, diikuti dengan peraturan kelajuan lata + pengurang motor penggulungan.












